Cette page présente la version du X4 actuellement en cours de développement.
|
| Avant : | Après : |
 |

|
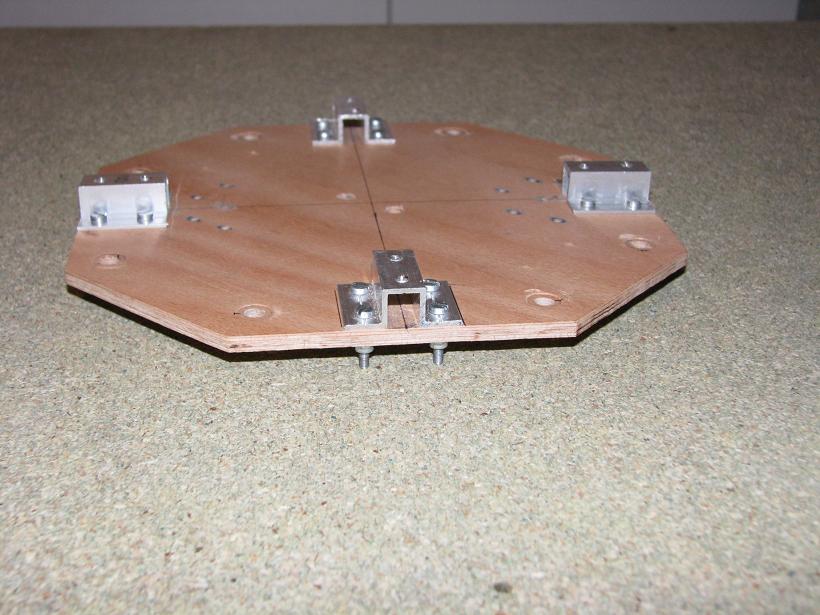
Le train d'atterrissage est en alu plié et les bras sont fixés sur le plateau principal par des profilés en U.
 |
 |
 L'électronique
L'électronique
Le VMixer de la version X4-F est remplacé par une carte mère intégrant un dsPIC et les différents interfaces d'entrées / sorties du micro.
Les interfaces utilisées sont :
- les entrées analogiques pour les acquisitions des tensions des capteurs et des potentiomčtres de réglages
- les détections de fronts montants (ou descendants) pour l'acquisition des commandes RC classiques
- l'I2C pour la communication avec les controlleurs brushless
- les ports UART pour les communications avec les périphériques tels que le module d'enregistrement des données de vol
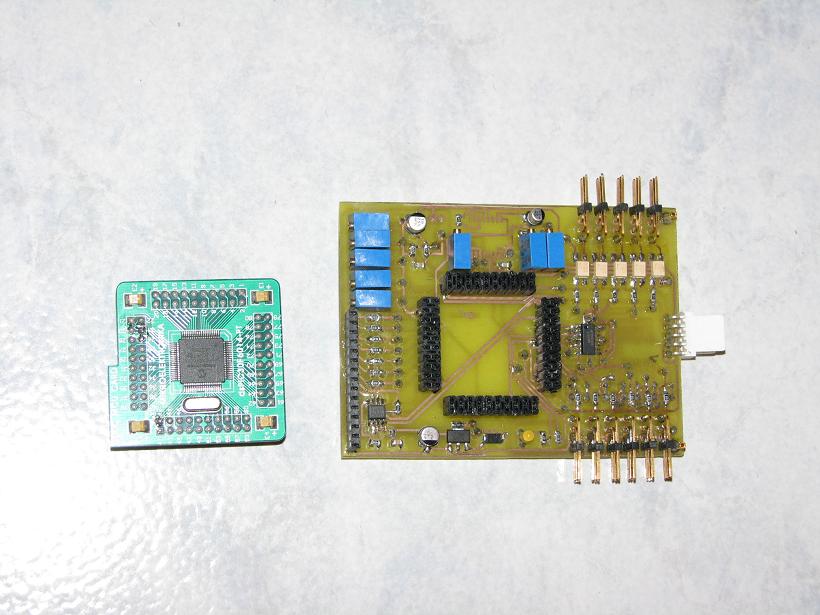
La carte mère Saphyr V2.0 :
|
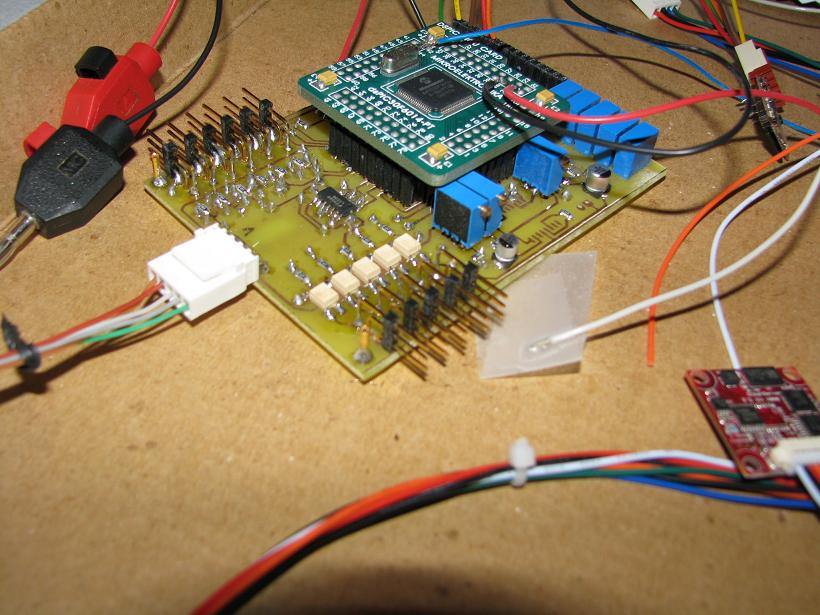 |
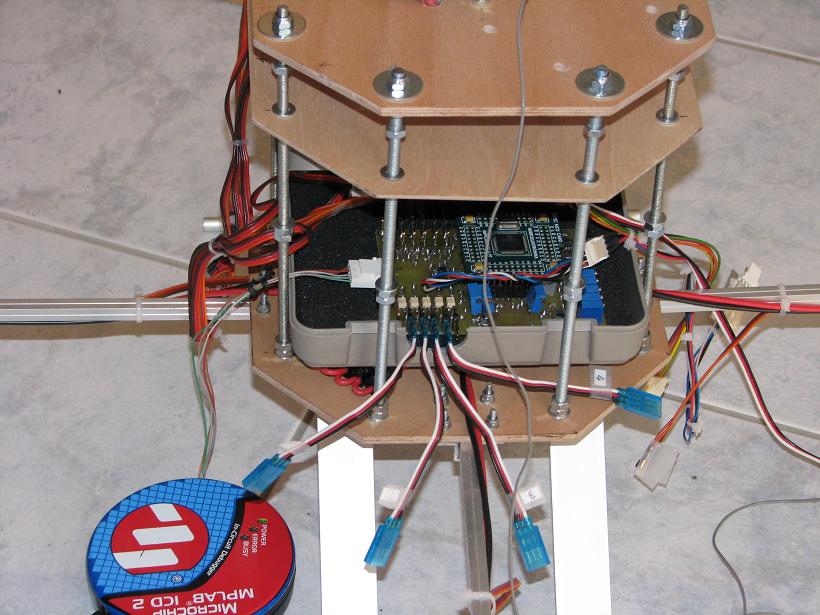
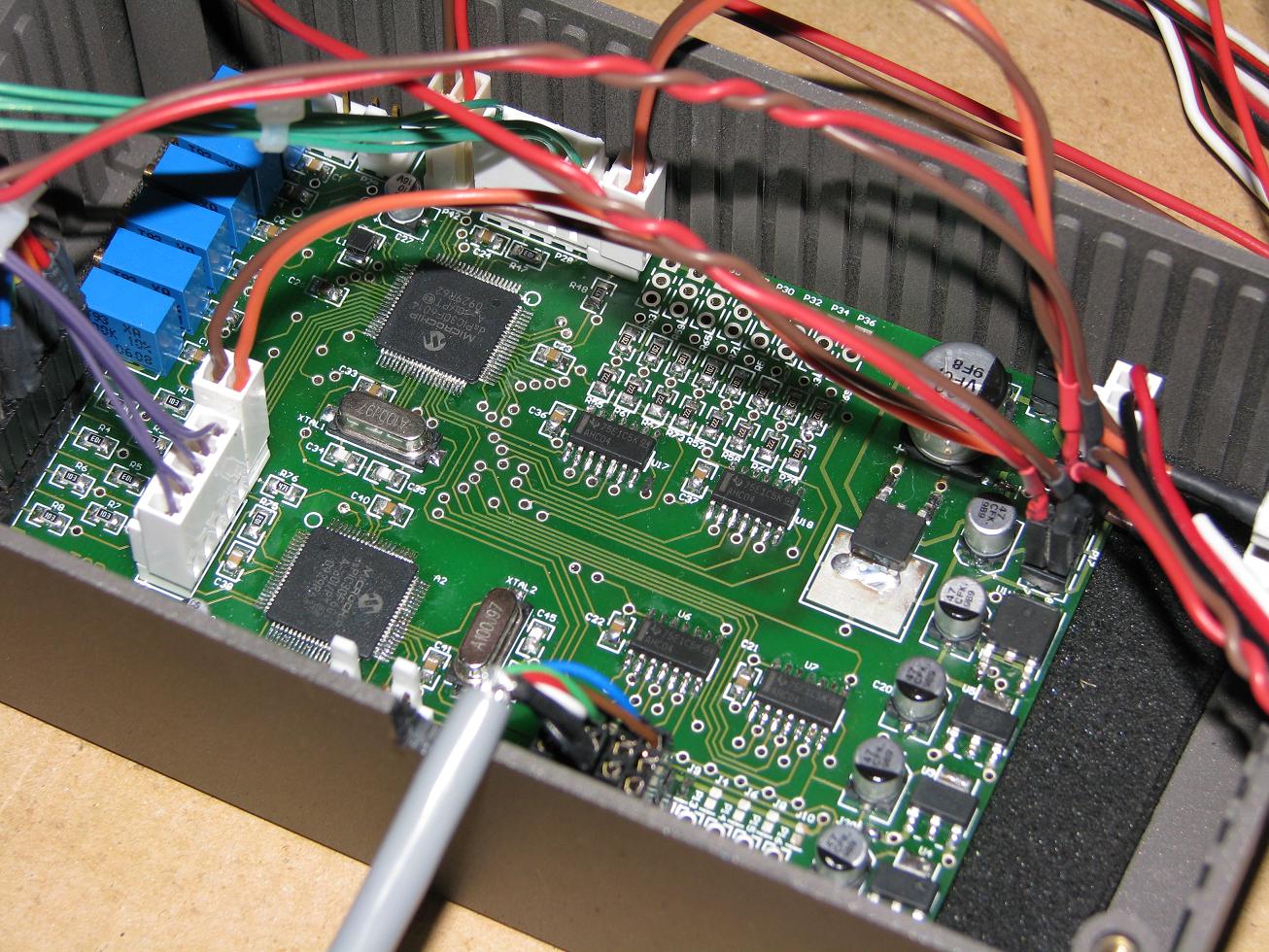
Intégration dans le X4-V2.1 :
 |
 |
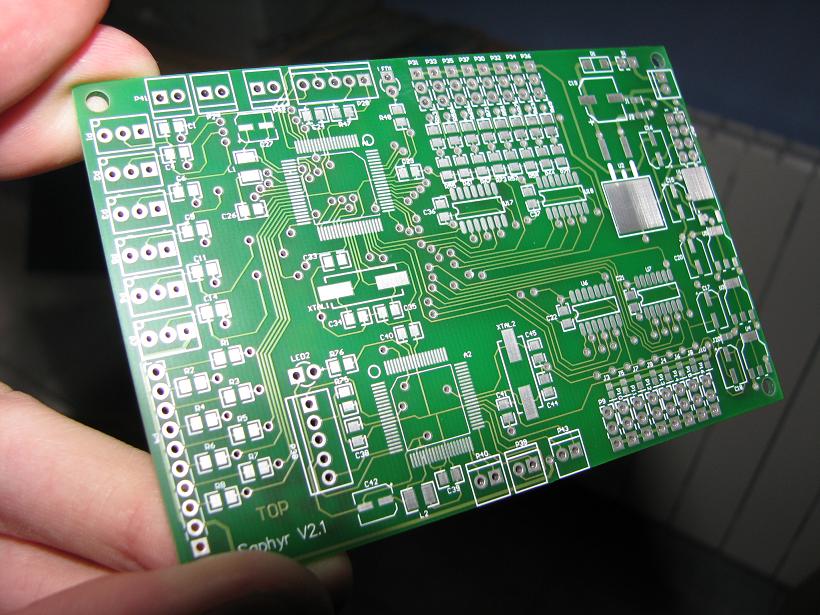
La SAPHYR V2.0 est maintenant remplacée par la SAPHYR V2.1. La SAPHYR V2.1 mérite vraiment le nom de carte mère. Elle met en oeuvre deux microcontrolleurs dsPIC et fournit le maximum d'entrées / sorties, la rendant ainsi évolutive. Les périphériques, les capteurs et les actuateurs sont externalisés.
La carte mère Saphyr V2.1 nue (ŕ gauche) et équipée (ŕ droite) :
 |
 |
Pour la programmation, le travail est grandement facilité grâce à la librairie de Lubin KERHUEL. Cette librairie fonctionnant sous MatLab / Simulink permet de mettre en oeuvre rapidement les différentes fonctionnalités du dsPIC sans avoir à se replonger dans la documentation du microcontrolleur. L'architecture du logiciel embarqué est ainsi beaucoup plus facile à visualiser. L'utilisation simultanément de cette librairie et de Simulink permet de générer un code très complexe en très peu de temps. Pour plus d'information sur cette librairie, voici le lien de l'excellent site de Lubin : http://www.kerhuel.eu/wiki/Simulink_-_Embedded_Target_for_PIC
Les essais
1er vol : 27 mars 2010 dans le sous sol de la résidence.
Pourquoi s'agit il du premier vol? parce que le X4 s'est soulevé pour la 1ère fois à plat et a atteint l'altitude de 20 cm environ et s'est posé 2 mètres plus loin toujours à plat. Et contrairement aux précédents exploits de ce genre, l'évènement a pu être reproduit plusieurs fois de suite.
Durant les jours suivants, d'autres tentatives vont avoir lieu en extérieur car le sous sol de la résidence devient trop étroit. Durant ces tentatives le X4 décolle fort (un peu trop même parfois) mais il oscille franchement un peu comme une assiette perchée sur sa baguette, en fin de numéro chinois, juste avant qu'elle s'arrête de tournoyer. Il faudra ajuster les régulateurs mais celà devient difficile en extérieur en raison du vent.
Je me met alors en quête d'un gymnase. J'ai l'opportunité de faire des essais dans un gymnase le 20 mai 2010. Un ENORME merci à Phil pour m'avoir donner cette opportunité. Les essais en gymnase m'ont permis de comprendre que les corrections imposées par les régulateurs étaient les bonnes mais qu'elles intervennaient un tout petit peu trop tard. Quelques lignes de codes plus tard.....
1er vol stabilisé en tangage et roulis : 20 mars 2010 en extérieur dans un lieu qui restera secret
Quelques lignes de codes plus tard, je suis de nouveau en extérieur avec quelques rafales de vent. Cette fois le X4 montre à plusieurs reprises qu'il est capable de se stabiliser à plat de manière autonome. Il y aura même un vol complet avec un décollage jusqu'à 2 mètres d'altitude suivi d'une translation lente de 5 secondes et d'un atterrissage à plat. Les autres fois l'atterrissage reste périlleux surtout lorsqu'une rafale de vent intervient pendant la réduction des gaz
Ces capacités fraichement acquises par le X4 ont été confirmées le 23 mai 2010 lors de la rencontre modéliste organisée par Phil à Puiseaux (merci encore à Phil). Voici deux courtes vidéos réalisées ce jour là :
L'atterrissage "brutal" mais non destructeur pour la machine est un des points à améliorer au plus vite.
Il ne reste plus qu'à rebrancher le compas et le GPS pour donner suites à cette aventure.....
Nouveau record de durée de vol : le 3 juin 2010.
En attendant la livraison d'un nouveau GPS 10Hz et quelques essais plus tard, les calibrations des régulateurs d'assiettes sont maintenant figées. Ce 3 juin 2010, le X4 réalise, entre autre, un vol de 19 secondes.