|

|

|
|
|
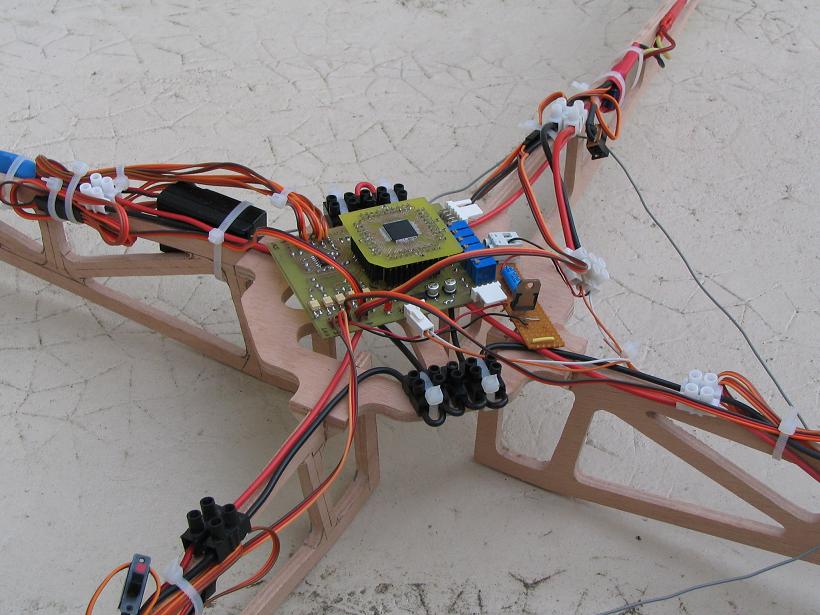
Noel 2006, tentative de décollage de la machine en mode manuel. Les jours précédents, le point fixe (essai de puissance maxi avec la machine bien accrochée au sol) et le contrôle des commandes avaient donné toute satisfaction. Ce jour, la machine commence ŕ tourner sur elle-męme ŕ cause de l'écart de puissance entre les rotors controlant le tangage et les rotors controlant le roulis. Ce phénomčne normal est trčs rapidement compenser par le trim de la commande de lacet.
La machine est posée au sol sur quatres points. La puissance nécessaire pour l'arracher du sol ŕ trčs vite raison de l'un des bras en contre plaqué. Aprčs enquęte, il s'avčre que l'un des moteurs commençaient ŕ se détacher de son support. Les vibrations engendrées ont provoqué la rupture de la structure. ATTENTION donc ŕ ces vis sans tętes d'origines qui sont incapable de maintenir le stator en place męme aprčs un serrage "fort". Ces vis seront remplacées par des vis standards moins esthétiques mais qui ont l'avantage de ne pas bouger.
2nd prototype :
Le second prototype voit le jour en un mois. La structure est construite en aluminium ŕ l'aide de pičces achetées en grande surfaces de bricolages. Ce proto voit l'ajout d'un cerceau de gymnastique afin de rassurer sur la stabilité de l'ensemble lors du retour au sol.
Le premier essai permet ŕ l'engin de décoller de quelques centimčtres, celui-ci se translate fortement dans une direction. La mise ŕ plat en mode manuel est plutôt délicate. L'essai s'achčve par l'extinction d'un moteur, celui-lŕ męme dont le bras de support a subi une rupture un mois auparavant.
Une soudure défectueuse est soupçonnée. A suivre.....
Mise ŕ jour janvier 2007.